
CUBE Bathymetric data Processing and Analysis

Preface
This document has been produced to help hydrographers during the processing of bathymetric data. In order to work properly, the positioning, water levels and the resolution of the bathymetric surfaces must be rigorously controlled and defined before using CUBE. Choosing the right resolution of bathymetric surfaces will greatly reduce the processing time, provide a better seafloor relief definition and a safer shoal detection.
This document must be used in conjunction with the Hydrographic Standards, the Hydrographic Survey Management Guidelines and the ISO quality management system documentation.
Prepared by:
Canadian Hydrographic Service
Fisheries and Oceans Canada
February 2012
Table of Contents
- Introduction
- 1 Data acquisition best practice
- 2 Minimising the systematic errors
- 3 Data processing workflow diagram
- 3.1 HIPS Vessel Files (HVFs)
- 3.2 Create project Convert the data
- 3.3 Load True Heave
- 3.4 Load Attitude Navigation data
- 3.5 Load error data
- 3.6 Sound velocity correction
- 3.7 Load Tide
- 3.8 Merge
- 3.9 Compute TPU
- 3.10 Define new Fieldsheet
- 3.11 Generate base surface
- 3.12 Data QC and Filtering
- 3.13 Finalize Surface
- 3.14 BDB
- 3.15 CHSDir
- 3.16 Create product
Introduction
The Canadian Hydrographic Service (CHS) has been using Caris-HIPS as its main bathymetric processing tool. This document outlines the optimal CUBE processing workflow and methodology in order to obtain high quality Bathymetric Surfaces and their associated uncertainties.
1 Data acquisition best practice
The quality of the final bathymetric surface is directly related to the quality of the acquired data. It is therefore important for the hydrographer to understand and execute a rigorous data acquisition methodology, be able to recognize the problems as they occur and apply the adequate corrective actions before the end of the survey. This will considerably reduce the CUBE processing time and the bathymetric surface uncertainties.
2 Minimising the systematic errors
Table 1 is designed to be used for the preparation of surveys as well as the processing of bathymetric data. It should be used as a guideline for the optimization of the acquisition and processing in order to obtain the best extract of a bathymetric dataset. To achieve the resolution and precision listed in Table 1, the hydrographer must take into account the characteristics of the survey equipment and adapt the survey methodology (see notes in the Table 1). CHS has determined a depth up to which the data must be checked and validated to ensure that all shoals are included in the final surface. This depth limit is set to navigational characteristics of the area plus a safety margin or the maximum of 50 meters. In depths greater than 50 meters, CHS will ensure a minimum validation of the data.
Table 1 : Recommended Base surface resolution
| Depth up to | Surface resolution Size of features detected | POSACC | SOUACC | Positioning system requirement | CHS Order | Comments |
| 15m | 0.25m | 0.125m | <0.19 | RTK PPK | Exclusive Special | |
| 25m | 0.50m | 0.25m | <0.31 | RTK PPK | Special | |
| 50m | 1.00m | 0.50m | <0.45 | PPP DGPS WASS C-Nav Starfix | Special | Shoal validation limit |
| 100m | 2.00m | 1.00m | <1.39 | Standalone post-processing | 1 | |
| 100m+ | 5.00m+ | 2.50m+ | <2.51+ | Standalone GPS | 2 | |
|
Notes:
|
||||||
3 Data processing workflow diagram
The bathymetric data processing and analysis workflow is summarized in the following diagram. This diagram is derived from the Caris-HIPS tools documentation and is intended to simplify and standardize the CUBE bathymetric data processing within the Canadian Hydrographic Service. Each step is described in the following sections.
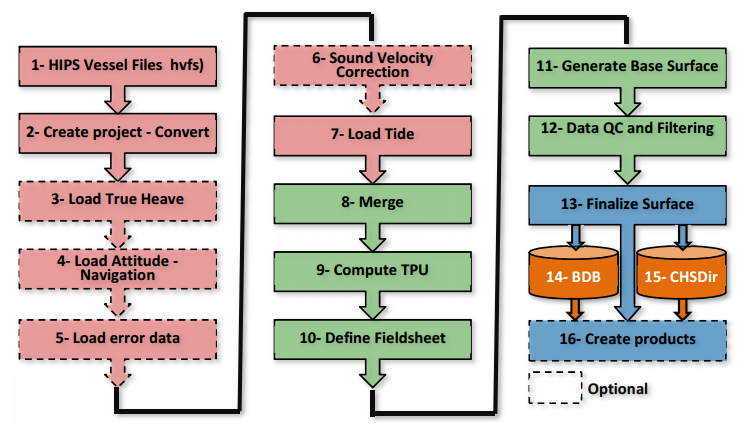
CHS CUBE bathymetric processing workflow
3.1 HIPS Vessel Files (HVFs)
The Hydrographic Vessel File (HVF) is a key component in the HIPS-SIPS data processing workflow. All the lever arms and offsets should be put either in the sounding system (i.e. SIS), the attitude system (i.e. POSMV) and or the HVF, depending on the system setup and processing methodology. All residual offsets found during a patch test or during the processing must be accounted for and put in the appropriate system or the HVF.
XYZ offsets values for TPU in the Standard Deviation line (HVF) are fixed. Vessel speed, loading, draft and delta draft are linked to draft table and must be populated if a draft table is used. Patch test accuracy values for alignment are put in MRU align StdDev for gyro and roll pitch. All other values come from manufacturer’s specs unless using the “error data” file from PosPac, in which case the HVF should be built with the WGS84 datum.

All the HVF files must be managed, kept up to date and distributed to the hydrographers. It is the hydrographer’s responsibility to use and apply the proper HVF files for each dataset.
3.2 Create project Convert the data
Project creation and data conversion are the necessary first steps of data processing. The hydrographers must know how to use the conversion tools to select and apply the appropriate parameters in order to ensure that the data is properly converted. A thorough verification of the converted data must be done to validate the conversion. Refer to Caris-HIPS manual and or regional ISO procedures for details.
3.3 Load True Heave
It is highly recommended to log TrueHeave data during acquisition in order that the computed heave values may be applied to the hydrographic data in post-processing. Note that “Load True Heave” will also load True Heave RMS data.
Note that at the time of this writing, TrueHeave RMS will automatically be used over GPS height RMS.
3.4 Load Attitude Navigation data
It is highly recommended to record PosPac raw data during the acquisition. PosPac processing enhance the navigation and attitude data recorded in real time. The Smoothed Best Estimate of Trajectory (SBET) files can be loaded using “Load Navigation Attitude Data”. New HDCS navigation and or attitude files will be created with a new date extension. This can also be verified with the Line Query tool. Using a SBET file, the project should be conducted in WGS84 datum.
Navigation data (from other GPS post-processed software) can also be loaded using the Generic Data Parser.
3.5 Load error data
If SBET files have been loaded, the associated RMS error data files can be loaded in HIPS. These RMS values will override the fixed errors values from the HVF files.
3.6 Sound velocity correction
Sound velocity correction can be done in real time or in post-processing depending of the sounding system setup.
Sound Velocity at transducer head should always been logged. If offsets between SV at the transducer and SVP cast are greater than 5m , a new cast should be done.
SVP acquisition frequency is determined by the order of the survey and the local water column characteristic of the survey area and should be done on a regular basis when operationally practical.
Note that it is possible to merge SVP files into one single file for SVP post processing (using options closest in time and or position). Make sure time and position are correctly documented in each SVP file.
3.7 Load Tide
Tide can either come from a loaded tide file (gauge, staff, prediction, etc.) or by using the Compute GPS Tide if GPS height data is available (SBET, RTK, PPK, etc.).
The Compute GPS Tide options must be carefully selected based on setup to ensure that certain parameters are not double applied or that they need to be removed from the solution. GPS Tide Time Series may be filtered when required.
In all cases, vertical reference information must be provided by the Regional Tidal Officer.
3.8 Merge
Merging the data will apply all the offsets and attitude values to position all the bathymetry. Hydrographers must ensure that the proper parameters are selected while merging the data.
3.9 Compute TPU
TPU values in the hvf files as well as those entered in the Compute TPU window are set at 1 sigma.
3.9.1 Compute TPU window
TPU Tide values when Tide files are applied should come from the Tidal officer. The instrument precision, the datum precision and the distance from a Tide Station must be taken into account:
The first two components are used in the measured tide uncertainty calculation, the last one is used for the zoning calculation. It is important to note that if True Heave is loaded while using a GPS water level reduction strategy, it is possible to enter an estimate of the height error in one of the tide sections to capture it in the TPU computation.
Sound speed values come from the manufacturer’s specifications. If the data is corrected for refraction, the values should be different than if no corrections were applied. Try to put the most realistic values in order to have the most representative results by propagating the spatial temporal uncertainty estimate with the instrument uncertainty:
If “Error data” has been loaded, this option must be checked in the Uncertainty source section.
3.10 Define new Fieldsheet
The fieldsheet must cover the surveyed area (or a specific area to be processed). Once the fieldsheet is created, it must not be altered during the CUBE processing stages. Changing the limits of the fieldsheet will move the cells location in the bathymetric surface and necessarily change the computed CUBE solution. If the first CUBE surface was validated, it will have to be re-validated. In order to avoid problems during the process, all the parameters of the fieldsheet (projection, limits, etc.) must be carefully selected.
3.11 Generate base surface
Choosing the CUBE surface resolution is critical. The sounding density, the sounder footprint and the precision of the survey (XYZ) must be considered while determining the final resolution. Note that the Base Surface resolution must never be finer then the sounder footprint resolution. Single resolution should be used until variable resolution is implemented. Suggested resolution can be found in Table 1.
The proper CHS Order must be selected in step 3 of the creation wizard. Note that the values for Exclusive Order can be entered manually (user defined). Suggested Order can be found in Table 1.
It is recommended to use the default parameter values (default, shallow, depth) included in the CARIS Base Surface Wizard (step 4). It is suggested to compare surfaces made using the shallow, default and the deep settings and if there are no differences, default should be used. If differences occur, shallow or deep setting may yield a more desirable result.
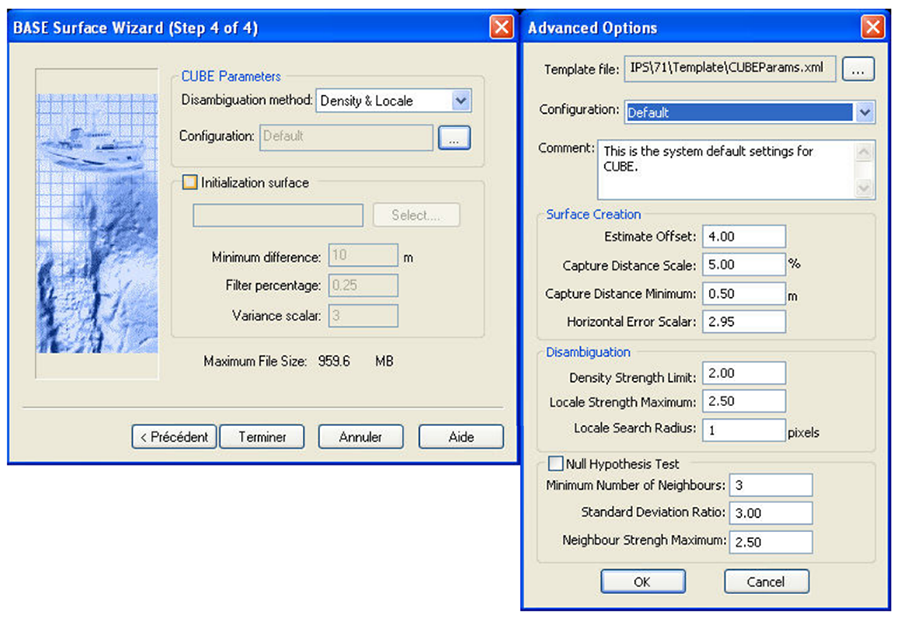
Select Default Shallow Deep
3.12 Data QC and Filtering
Data validating is an iterative process. It may be necessary to repeat the previous steps when major problems are detected (refraction, water level, positioning, attitude, etc.) CUBE Processing is defined as a method for validating or controlling the CUBE base surface quality, either by filtering, designating, rejecting soundings, etc. in the appropriate tools (ie. navigation, attitude, subset or swath editors). Considering that the CUBE Base Surface is the final product, filtering of the HDCS data based on the Base Surface is not mandatory but may be desired.
The focus and most time spent on surface validation and sounding designation should be put on areas with depths less than 50m or areas requiring special attention due to specific navigational characteristics or requirements. In deeper areas, a visual inspection of the Base Surface and its various statistical layers should be used to detect anomalies or blunders requiring attention. In general, the data 50m and deeper should be processed primarily using automated methods.
During this process the hydrographer may find that the Survey Order defined while creating the Base Surface is not appropriate. A new Base Surface must be created and re-processed.
3.13 Finalize Surface
It is suggested to use “Uncertainty” as a final uncertainty value, but Standard Deviation can be used if desired. Apply designated soundings should always be selected if the critical soundings layer is present. This ensures that the shoal soundings are preserved in the surface.
To avoid sounding selection conflicts with the designated soundings in the cartographic process, it is recomended to remove the « Designated Sounding » layer from the finalized Base Surface.
3.14 BDB
The Bathymetric DataBase is implemented differently in each region. Hydrographer must refer to the regional ISO procedures before loading data.
3.15 CHSDir
Metadata for each dataset must be entered in CHSDir. Hydrographer must refer to the regional ISO procedures.
3.16 Create product
Surveys may be requested by an external client. Regions have defined their own procedures for product creation or data delivery. Hydrographer must refer to the regional ISO procedures.
- Date modified: