
Traitement et analyse des données bathymétriques de CUBE

Preface
Le présent document a été produit afin d'aider les hydrographes à traiter les données bathymétriques. Afin de travailler efficacement , il faut rigoureusement contrôler et définir le positionnement, les niveaux d'eau et la résolution des surfaces bathymétriques avant d'utiliser CUBE. Le fait de choisir la bonne résolution des surfaces bathymétriques réduira considérablement la durée de traitement, offrira une meilleure résolution du relief des fonds marins, ainsi qu'une détection plus sûre des hauts-fonds.
Le présent document doit être utilisé conjointement avec les normes hydrographiques, les lignes directrices sur la gestion de levés hydrographiques et la documentation du système de gestion de la qualité de l'ISO.
Préparé par :
Service hydrographique du Canada
Pêches et Océans Canada
1e édition
Février 2012
Table des matières
- Introduction
- 1 Meilleures pratiques en matière d'acquisition des données
- 2 Minimiser les erreurs systématiques
- 3 Diagramme du flux de travail relatif au traitement des données
- 3.1 Fichiers de configuration des navires (HVF)
- 3.2 Création de projets / Conversion des données
- 3.3 Chargement de True Heave
- 3.4 Chargement des données d'attitude / de navigation
- 3.5 Chargement des données sur les erreurs
- 3.6 Correction de la vitesse du son
- 3.7 Chargement des marées
- 3.8 Fusion
- 3.9 Calcul de la TPU (incertitude propagée totale)
- 3.10 Définition de nouvelles minutes hydrographiques
- 3.11 Génération de la surface CUBE
- 3.12 Contrôle de la qualité et filtrage des données
- 3.13 Finalisation de la surface
- 3.14 BDB
- 3.15 Répertoire du SHC
- 3.16 Création du produit
Introduction
Le Service hydrographique du Canada (SHC) utilise le logiciel Caris-HIPS comme principal outil de traitement des données bathymétriques. Le présent document donne un aperçu de la méthodologie et du flux de traitement CUBE permettant d'obtenir des surfaces bathymétriques de grande qualité et leurs incertitudes associées.
1 Meilleures pratiques en matière d'acquisition des données
La qualité de la surface bathymétrique finale est directement liée à la qualité des données acquises. Par conséquent, il est important que l'hydrographe comprenne et applique une méthode rigoureuse d'acquisition des données, soit capable de reconnaître les problèmes dès leur apparition et applique les mesures correctrices adéquates avant la fin du levé. Cela réduira considérablement la durée du traitement CUBE et les incertitudes des surfaces bathymétriques.
2 Minimiser les erreurs systématiques
Le Tableau 1 est conçu pour préparer des levés et le traitement des données bathymétriques. Il doit être utilisé comme ligne directrice pour l'optimisation de l'acquisition et du traitement, afin d'obtenir le meilleur extrait d'un ensemble de données bathymétriques. Pour obtenir la résolution et la précision indiquées dans le Tableau 1, l'hydrographe doit tenir compte des caractéristiques de l'équipement de levé et adapter la méthode de levé (consulter les remarques du tableau 1). Le SHC a déterminé une profondeur jusqu'à laquelle les données doivent être vérifiées et validées pour que tous les hauts fonds soient inclus dans la surface finale. Cette limite de profondeur est fixée aux caractéristiques de navigation de la zone auxquelles on a ajouté une marge de sécurité, ou au maximum de 50 mètres. Dans les profondeurs supérieures à 50 mètres, le SHC assurera une validation minimale des données.
Tableau 1 : Résolution recommandée de la surface de base
| Profondeur jusqu'à | Résolution de la surface / Dimension des éléments détectés | POSACC | SOUACC | Exigence liée au système de positionnement | Ordre du SHC | Commentaires |
| 15m | 0,25m | 0,125m | <0,19 | RTK PPK | Spécial exclusif | |
| 25m | 0,50m | 0,25m | <0,31 | RTK PPK | Spécial | |
| 50m | 1,00m | 0,50m | <0,45 | PPP DGPS WASS C-Nav Starfix | Spécial | Limite de validation des hauts-fonds |
| 100m | 2,00m | 1,00m | <1,39 | Post-traitement autonome | 1 | |
| 100m+ | 5,00m+ | 2,50m+ | <2,51+ | GPS autonome | 2 | |
|
Remarques :
|
||||||
3 Diagramme du flux de travail relatif au traitement des données
Le flux de traitement et l'analyse des données bathymétriques est résumé dans le diagramme suivant. Ce diagramme est dérivé de la documentation des outils Caris-HIPS et vise à simplifier et à normaliser le traitement des données bathymétriques à l’aide de CUBE au sein du Service hydrographique du Canada. Chaque étape est décrite dans les sections suivantes.
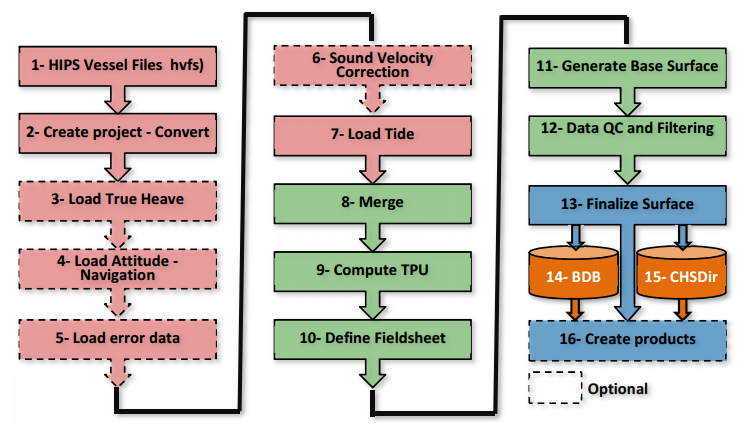
Flux de travail relatif au traitement des données bathymétriques CUBE
3.1 Fichiers de configuration des navires (HVF)
Le fichier de configuration des navires (HVF) est un élément clé du flux de de traitement des données HIPS-SIPS. Tous les bras de levier et les décalages doivent être indiqués dans l'équipement de sondage (c.-à-d. SIS), la centrale d'attitude (c.-à-d. POS/MV) ou le HVF, en fonction du paramétrage de l'équipement et de la méthode de traitement. Tous les décalages résiduels repérés pendant un « patch test » ou pendant le traitement doivent être justifiés et consignés dans le système adéquat ou dans le HVF.
Dans la section Écart Type (Standard Deviation) de la section TPU, les décalages vertical et horizontaux (xyz offset) sont fixes. La vitesse, le chargement du navire, le tirant d'eau et l’écart sur le tirant d'eau du navire sont liés à la table des tirants d'eau et doivent être inscrits si une telle table est utilisée. Les valeurs de précision pour l'alignement déterminés lors du « patch test » sont indiquées dans Écart type de l'alignement du MRU pour le gyroscope et le roulis/tangage. Toutes les autres valeurs proviennent des spécifications du fabricant, sauf en cas d'utilisation du fichier « données sur les erreurs » de PosPac, auquel cas le fichier HVF du navire hydrographique devra être construit en utilisant le système de référence géodésique WGS84.

Tous les fichiers HVF doivent être gérés, maintenus à jour et communiqués aux hydrographes. Il revient à l'hydrographe d'utiliser et d'appliquer les fichiers HVF appropriés à chaque ensemble de données.
3.2 Création de projets / Conversion des données
La création de projets et la conversion des données sont les premières étapes nécessaires au traitement des données. Les hydrographes doivent savoir comment utiliser les outils de conversion pour sélectionner et appliquer les paramètres adéquats pour effectuer une bonne conversion des données. Une vérification rigoureuse des données converties doit être effectuée pour valider la conversion. Il faut consulter le manuel Caris-HIPS ainsi que les procédures ISO régionales pour obtenir des détails.
3.3 Chargement de True Heave
Il est fortement recommandé de charger les données de True Heave pendant l'acquisition, afin d’appliquer les valeurs calculées de pilonnement (Heave) aux données hydrographiques lors du post-traitement. Noter que ‘Load True Heave’ chargera également les données sur l’imprécision (RMS ou valeur quadratique moyenne).
Il convient de remarquer qu'au moment de la rédaction du présent document, la valeur quadratique moyenne (RMS) de True Heave sera automatiquement utilisée, plutôt que valeur quadratique moyenne (RMS) de la hauteur GPS.
3.4 Chargement des données d'attitude / de navigation
Il est fortement recommandé d'enregistrer les données brutes de PosPac pendant l'acquisition. Le traitement PosPac améliore généralement les données de navigation et d'attitude enregistrées en temps réel. Les fichiers de meilleure estimation de trajectoire lissée (SBET) peuvent être chargés à l'aide de la fonction « Load Navigation/Attitude Data ». De nouveaux fichiers de navigation et/ou d'attitude seront créés dans la structure de fichiers HDCS avec un suffixe correspondant à la date de création. Cela peut également être vérifié avec l'outil Line Query. Si l'on utilise un fichier SBET, le projet doit être dans le système de référence géodésique WGS84.
Les données sur la navigation (provenant d'un autre logiciel de post-traitement GPS) peuvent également être chargées à l'aide de l’outil « Generic Data Parser ».
3.5 Chargement des données sur les erreurs
Si des fichiers SBET ont été chargés, les fichiers d’erreur RMS (valeur quadratique moyenne) associés peuvent être chargés dans HIPS. Ces valeurs RMS auront préséance sur les valeurs d’erreurs fixes inscrites dans les fichiers HVF.
3.6 Correction de la vitesse du son
La correction de la vitesse du son peut être effectuée en temps réel ou au cours du post-traitement, en fonction des paramètres de l'équipement de sondage.
La vitesse du son à la tête du transducteur doit toujours être enregistrée. Si les différences entre la vitesse du son au niveau du transducteur et le profil de vitesse du son (SVP) sont supérieurs à 5 m/s, il faut effectuer un nouveau profil.
L'acquisition du profil de vitesse du son est réalisée à une fréquence déterminée par l'ordre du levé et les caractéristiques de la colonne d'eau locale de la zone du levé. Elle doit être effectuée régulièrement lorsque cela est possible d'un point de vue opérationnel.
veuillez noter qu'il est possible de fusionner les fichiers SVP en un seul fichier pour le post-traitement SVP (à l'aide des options « plus proches en temps et/ou en position »). Il faut s'assurer que le temps et la position sont correctement entrés dans chaque fichier SVP.
3.7 Chargement des marées
La marée provient soit d'un fichier de marées chargé (marégraphe, jauge, prévision, etc.), soit de l'utilisation d’une marée GPS calculée, si les données sur la hauteur GPS sont disponibles (SBET, RTK, PPK, etc.).
Il faut sélectionner avec soin les options de calcul des marées GPS lors du calcul pour s'assurer que certains paramètres ne sont pas appliqués deux fois ou qu'ils doivent être supprimés de la solution. Les séries temporelles de marées GPS peuvent être filtrées au besoin.
Dans tous les cas, l'information sur les références verticales doit être fournie par l'agent régional des Marées.
3.8 Fusion
La fusion des données (Merge) appliquera toutes les valeurs d’écarts et d'attitude pour positionner la bathymétrie. Les hydrographes doivent s'assurer de sélectionner les bons paramètres lorsqu'ils fusionnent des données.
3.9 Calcul de la TPU (incertitude propagée totale)
Les valeurs de la TPU dans les fichiers HVF, ainsi que celles saisies dans la fenêtre de calcul de la TPU, sont fixées à 1 sigma.
3.9.1 Fenêtre de calcul de la TPU
Lorsque les fichiers de marées sont appliqués, les valeurs de la TPU sur les marées doivent provenir de l'agent des Marées. La précision des instruments et du système de référence géodésique, ainsi que la distance par rapport à une station d'observation des marées doivent être prises en compte :
Les deux premiers éléments sont utilisés dans le calcul de l'incertitude de la marée mesurée, tandis que le dernier est utilisé pour le calcul du zonage. Il est important de noter que si le True Heave est chargé alors qu'on utilise une réduction du niveau d'eau par GPS, il est possible de saisir une estimation de l'erreur de hauteur dans l'une des sections sur les marées, afin de la prendre en compte dans le calcul de la TPU.
Les valeurs d’incertitudes de la vitesse du son proviennent des spécifications du fabricant. Si les données sont corrigées pour la réfraction, les valeurs doivent être différentes de celles entrées si la réfraction n’a pas été corrigée. Il faut essayer de saisir les valeurs les plus réalistes pour obtenir les résultats les plus représentatifs en propageant l'estimation de l'incertitude de l'instrument et l'estimation de l'incertitude spatiale/temporelle :
Si des « données sur les erreurs » ont été chargées, cette option doit être cochée dans la section source de l'incertitude (Uncertainty).
3.10 Définition de nouvelles minutes hydrographiques
Les minutes hydrographiques (Fieldsheet) doivent couvrir la zone du levé (ou une zone précise à traiter). Une fois créées, les minutes hydrographiques ne doivent pas être modifiées pendant les étapes de traitement CUBE. Le fait de changer les limites des minutes hydrographiques déplacera l'emplacement des cellules dans la surface bathymétrique et modifiera nécessairement la solution calculée par CUBE. Si la première surface CUBE a été validée, elle devra être validée de nouveau. Pour éviter les problèmes pendant le processus, il est impératif de sélectionner soigneusement tous les paramètres des minutes hydrographiques (projection, limites, etc.).
3.11 Génération de la surface CUBE
Le choix de la résolution de la surface CUBE est critique. La densité des sondes, l'empreinte des sondeurs (footprint) et la précision du levé (XYZ) doivent être prises en compte lors de la détermination de la résolution finale. Il convient de noter que la résolution de la surface ne doit jamais être plus fine que celle de l'empreinte des sondeurs. Une seule résolution doit être utilisée jusqu'à ce qu'une résolution variable soit implantée. La résolution suggérée se trouve dans le Tableau 1.
Il faut sélectionner l'ordre de levé (SHC) approprié à l'étape 3 de l'assistant de création de la surface de base. Il convient de noter que les valeurs de l'ordre exclusif peuvent être saisies manuellement (définies par l'utilisateur). L'ordre suggéré se trouve dans le Tableau 1.
Il est recommandé d'utiliser les paramètres par défaut (default [par défaut], shallow [peu profond], depth [profond]) incluses dans l'assistant de création de la surface (étape 4). Il est suggéré de comparer les surfaces obtenues à l'aide des options « shallow », « default » et « depth » et, s'il n'y a pas de différence, d'utiliser la valeur par défaut. En cas de différences, l’option « shallow » ou « depth » peut donner un meilleur résultat.
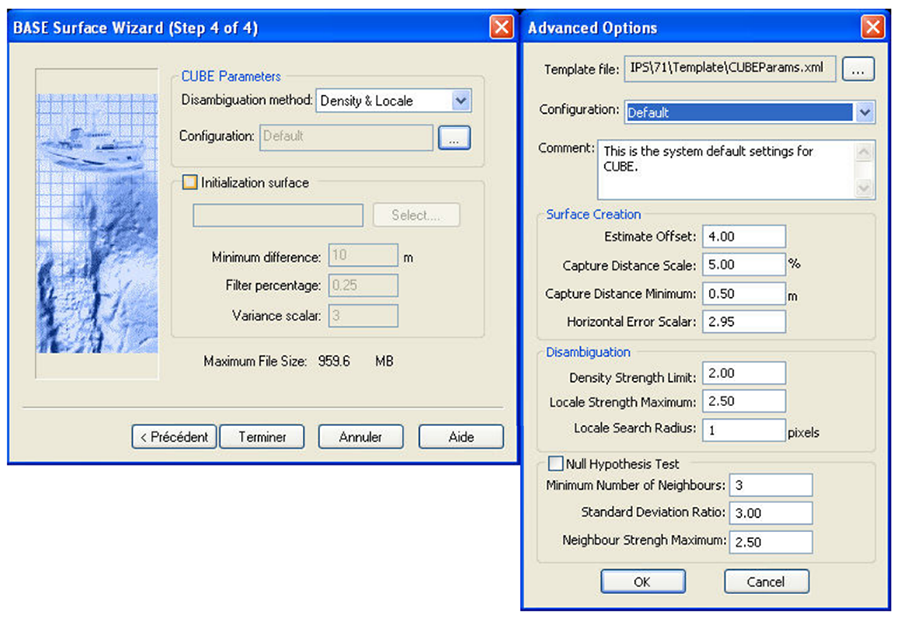
Sélectionner Default Shallow Depth
3.12 Contrôle de la qualité et filtrage des données
La validation des données est un processus itératif. Il peut être nécessaire de répéter les étapes précédentes lorsque des problèmes majeurs sont détectés (réfraction, niveau d'eau, positionnement, attitude, etc.). Le traitement CUBE est défini comme une méthode de validation ou de contrôle de la qualité de la surface CUBE en filtrant, en désignant ou en rejetant des sondes, etc. dans les outils appropriés (c.-à-d. « Navigation editor », « Attitude editor », « Subset editor » ou « Swath editor »). Étant donné que la surface CUBE est le produit final, le filtrage des données HDCS à partir de la surface de base n'est pas obligatoire, mais peut être souhaitable.
Pour la validation des surfaces et la désignation des sondes, il faut concentrer les efforts et la majeure partie du temps sur les zones dont la profondeur est inférieure à 50 m ou celles qui nécessitent une attention particulière en raison de caractéristiques ou d'exigences de navigation précises. Dans les zones plus profondes, il faut recourir à une inspection visuelle de la surface et de ses diverses couches statistiques pour détecter les anomalies ou les endroits à examiner. En général, il faut employer essentiellement des méthodes automatisées pour traiter les données des zones de 50 m de profondeur ou plus.
Au cours de ce processus, l'hydrographe peut trouver que l'ordre des levés défini lors de la création de la surface de base n'est pas approprié. Il faut alors créer une nouvelle surface et la traiter de nouveau.
3.13 Finalisation de la surface
Il est suggéré d'utiliser « Uncertainty » comme valeur de l'incertitude finale, mais l'écart type peut être utilisé au besoin. Il faut toujours choisir d’inclure les sondes désignées si la couche des sondes critiques est présente. Cela garantit que les sondes des hauts fonds sont préservés dans la surface.
Pour éviter les conflits de sélection des sondes avec les sondes désignées au cours du processus de production cartographique, il est recommandé de supprimer la couche « Designated soundings » dans la surface finale.
3.14 BDB
La base de données bathymétrique est implantée différemment dans chaque région. L'hydrographe doit se référer aux procédures ISO régionales avant de charger des données.
3.15 Répertoire du SHC
Les métadonnées de chaque ensemble de données doivent être saisies dans CHSDir. L'hydrographe doit consulter les procédures ISO régionales.
3.16 Création du produit
Des levés peuvent être demandés par un client externe. Les régions ont défini leurs propres procédures pour la création de produits ou la livraison des données. L'hydrographe doit consulter les procédures ISO régionales.
- Date de modification :